
Fig.1: Screenshot of the Intersection-Experiment - starting phase of the task i.e. preparing to leave the tunnel and drive further through an avenue of houses.

Fig.2: Screenshot
of the Intersection-Experiment - passage
through the avenue of houses. Due to this houses it is not possible to
look premature to the whole situation of the intersection. In this
experiment three different distances between the houses and the center
of
the intersection are used.
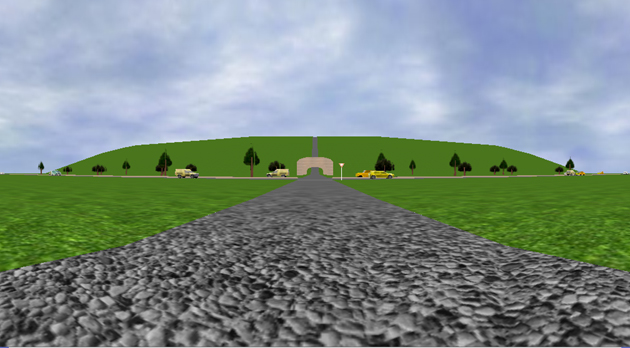
Fig.3: Screenshot of the Intersection-Experiment - approach to the intersection. In this experiment two different raffic densities and due to this two different severities to cross the intersection are implemented. The first density - 50% chance level to have a crash and the second one - 75% chance level to have a crash.
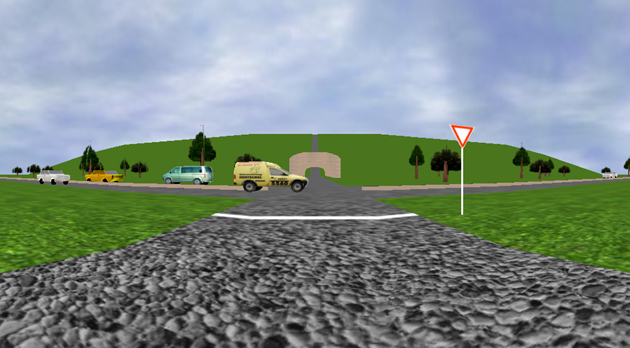
Fig.4: Screenshot
of the
Intersection-Experiment. This picture shows the situation straight just
before the intersection - be prepared for crossing.
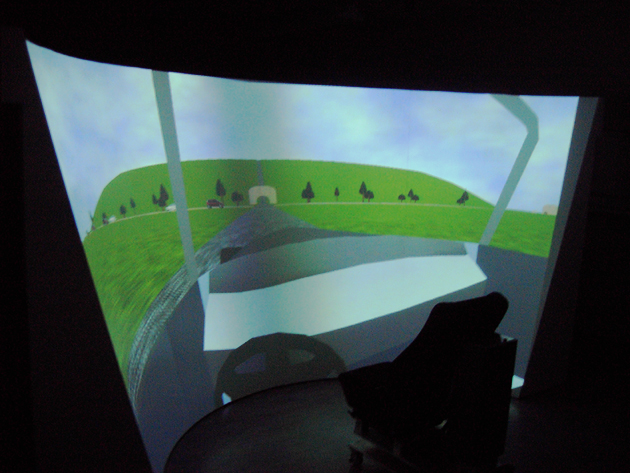
Fig.5: Picture of
the
Intersection task displayed on the curved, tilted projection screen
used in
our VR-room. In front of the screen the height adjustable,
comfortable arm chair can be seen. The virtual car mock-up
used i this experiment increases the sense of reality for this special
car driving task.

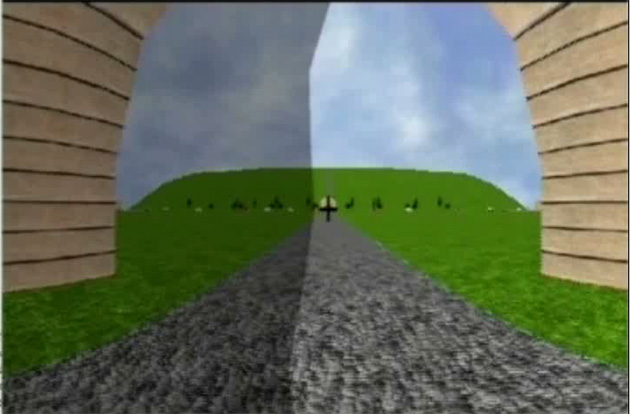
Movie 1: Real gaze
movements
(gaze = head + eye) of a hemianope
patient with a homonymous
loss
to the right. The transparent grey area represents the
visual limits of
the patients' scotoma. All objects behind this area are not visible for
the subject. The black cross symbolized the actual gaze point of these
patient.
This patient shows a good compensatory behavior and shifts the "blind" area adequately to the right side. Therefor the cars coming from the right side become visible.
This patient shows a good compensatory behavior and shifts the "blind" area adequately to the right side. Therefor the cars coming from the right side become visible.
Movie 2: Real gaze
movements
(gaze = head + eye) of a hemianope
patient
with a homonymous loss
to the left.
The transparent grey area
represents the limits of the patients' scotoma. All objects behind this
area are not visible for the subject. The black cross symbolized the
actual gaze point of these patient.
This patient shows a poor and insufficent compensatory behavior and does not shift the "blind" area to the left side. Therefor the cars coming from the left could not be perceived.
This patient shows a poor and insufficent compensatory behavior and does not shift the "blind" area to the left side. Therefor the cars coming from the left could not be perceived.